
Description
Ethical implications in autonomous driving are widely discussed [1]. Risk-based approach, where the probability of a potential collision as well as its severity characterized via a notion of harm, can be adopted while making driving decisions [2]. In cooperative autonomous driving, vehicular communication (V2X) unreliability represents the main source of uncertainty for respective decision making and we use study [3] as a starting point.
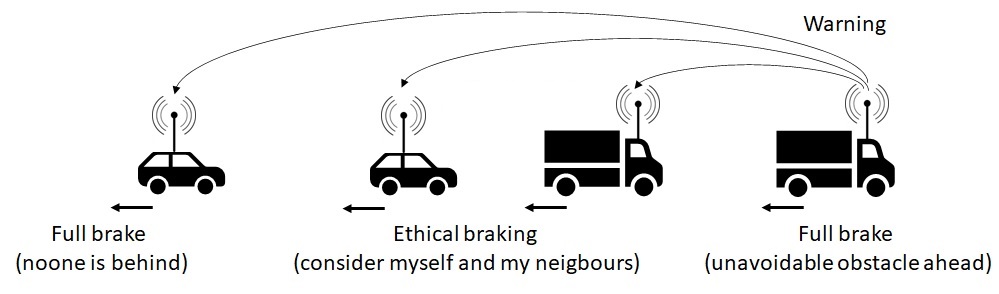
The illustrative scenario is a cooperative longitudinal driving. The leader applies maximum emergency braking deceleration (due to an unavoidable obstacle ahead) and emits the periodic warning message, which is transmitted to the followers. On the reception of the message, the third follower applies maximum deceleration (since no one is behind). In contrast, the first and the second followers can decide on their braking strategies (e.g. brake smooth). The objective is to design braking strategies taking into account certain ethical considerations, for example: minimize the overall harm of the potential accident, minimize the harm for one specific vehicle/users, equalize harm among all the vehicles/users.
We argue that information exchange between the vehicles via the V2X is the foundation for ethical driving. In other words autonomous vehicles must be cooperative to be able to resolve ethical dilemmas in a multi-vehicle scenario. The following research questions are suggested (the thesis can concentrate only on one/few of these or suggest other):
- How to assess risks in cooperative autonomous driving?
- What are ethical gains of cooperative driving with respect to non-cooperative one?
- How to design vehicular communications protocols to support ethical decision making?
References
- A. Martinho, N. Herber, M. Kroesen, and C. Chorus, “Ethical issues in focus by the autonomous vehicles industry,” Transport Reviews, vol. 41, no. 5, pp. 556–577, 2021. https://doi.org/10.1080/01441647.2020.1862355
- M. Geisslinger, F. Poszler, and M. Lienkamp, “An ethical trajectory planning algorithm for autonomous vehicles,” 2022. https://arxiv.org/abs/2212.08577
- G. Sidorenko, J. Thunberg, and A. Vinel, “Ethical v2x: Cooperative driving as the only ethical path to multi-vehicle safety,” 2023 IEEE 98th Vehicular Technology Conference: VTC2023-Fall, 2023.