
Student Assistant for pedestrian intention prediction (m/f/d)
-
Job:
Student Assistant
- Faculty / Division:
- Institute:
- Contact Person:
Job Description
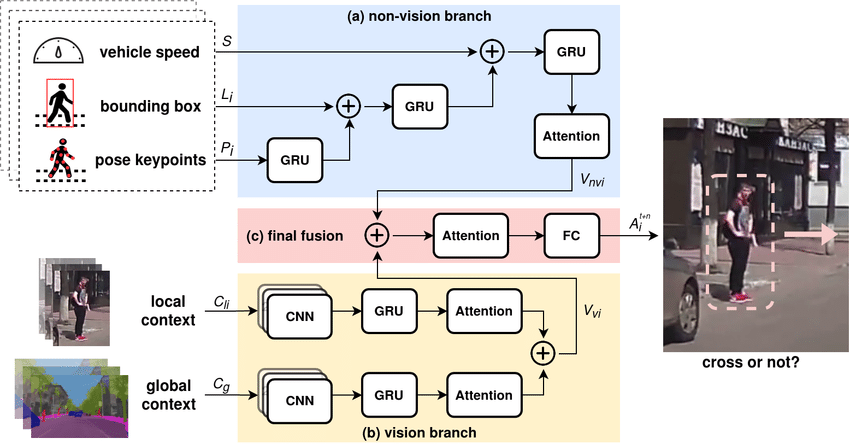
The Cooperative Autonomous Systems research group focuses on connected and autonomous vehicles and vulnerable road users. We research the latest technologies and methods to improve road safety. In this work we are interested in the task of pedestrian intention prediction.
You can support us as a student assistant and learn about the latest technologies and get an insight into research. In your HiWi work you will work on a pipeline to detect pedestrian intention prediction that is capable to work with real-world flows.
The tasks include:
- Implementing algorithms for pedestrian intention prediction, and integrating them into robot-based traffic control system
- Collecting real-world data (e.g. with a robot)
- Tuning of parameters of prediction algorithms
- Comparing and benchmarking different algorithms
- Contributing your own ideas or assisting with brainstorming
You should be motivated and have an interest in new technologies. You need to be proficient in at least one programming language. Experience with deep learning/neural networks and computer vision is highly desired.
What we offer:
- Flexible working hours
- Industry and research related activities
- Contribution to publications
- Working with the latest technologies
Have we sparked your interest in Vision Zero? Then send an email to manuel.bied∂kit.edu to find out more.